
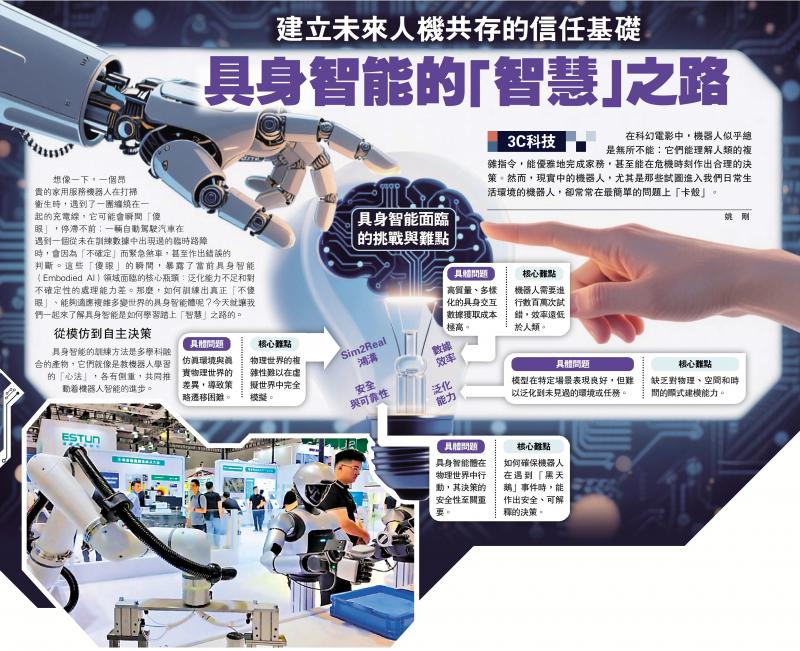
圖:具身智能的「智慧」之路
在科幻電影中,機器人似乎總是無所不能:它們能理解人類的複雜指令,能優雅地完成家務,甚至能在危機時刻作出合理的決策。然而,現實中的機器人,尤其是那些試圖進入我們日常生活環境的機器人,卻常常在最簡單的問題上「卡殼」。\姚 剛
想像一下,一個昂貴的家用服務機器人在打掃衞生時,遇到了一團纏繞在一起的充電線,它可能會瞬間「傻眼」,停滯不前;一輛自動駕駛汽車在遇到一個從未在訓練數據中出現過的臨時路障時,會因為「不確定」而緊急煞車,甚至作出錯誤的判斷。這些「傻眼」的瞬間,暴露了當前具身智能(Embodied AI)領域面臨的核心瓶頸:泛化能力不足和對不確定性的處理能力差。那麼,如何訓練出真正「不傻眼」、能夠適應複雜多變世界的具身智能體呢?今天就讓我們一起來了解具身智能是如何學習踏上「智慧」之路的。
從模仿到自主決策
具身智能的訓練方法是多學科融合的產物,它們就像是教機器人學習的「心法」,各有側重,共同推動着機器人智能的進步。
強化學習(RL):像訓練寵物一樣,通過「獎勵」學習
強化學習是具身智能中最核心的訓練方法之一。智能體(機器人)通過不斷地嘗試各種動作,並根據環境的反饋獲得「獎勵」或「懲罰」。它的目標是找到一套最優的行動策略,以最大化它獲得的累積獎勵。然而,它面臨的主要挑戰是樣本效率低下。在真實世界中,機器人需要進行數百萬次的試錯才能學會一個簡單的任務,這不僅耗時,而且可能損壞機器人或環境。此外,獎勵函數的設計也極其困難,獎勵設計得不好,機器人可能會學會「作弊」來獲得高分,而不是真正地完成任務。
模仿學習(IL):看着學,快速入門
模仿學習是解決強化學習樣本效率低下的一個有效途徑。機器人不再自己摸索,而是直接從人類或專家的示範數據中學習。最常見的形式是行為克隆,即直接將人類的輸入(如視覺圖像)映射到輸出動作,就像一個學徒「看着師傅做」。但它的挑戰在於無法超越專家表現,而且對示範數據的質量要求極高。更重要的是,一旦機器人遇到訓練數據中未曾出現過的新情況,它就會不知所措,表現會迅速惡化。
Sim2Real:在虛擬世界練兵,降低成本
由於真實世界訓練成本高昂,科學家們提出了Sim2Real(從仿真到現實)的方法。在虛擬仿真環境中訓練機器人策略,然後將學到的策略遷移到真實機器人上。仿真環境可以安全、快速地採集海量數據,並利用強化學習等高效訓練方法。就像飛行員在模擬器中進行數千小時的訓練,直到熟練掌握各種緊急情況的處理,然後才登上真正的飛機。然而,它面臨着具身智能領域的經典難題——虛擬世界和真實世界的物理差異(如摩擦力、光照、傳感器噪聲)是不可避免的。在仿真中表現完美的策略,到了現實中可能會「水土不服」。
結語
訓練具身智能的歷程,是一部讓其從「機械化工具」邁向「自主化夥伴」的進化史。我們教會了它模仿,教會了它提問,教會了它探索,如今正在教會它交互式學習。
如何讓機器在充滿未知的真實世界裏,依然可靠、安全地工作,這不僅關乎技術,更關乎未來人機共存的信任基礎。當機器真正學會了在不確定中思考與求助,我們迎來的,將不僅僅是一個更智能的機器,還是一個更理解人類意圖的協作新時代。